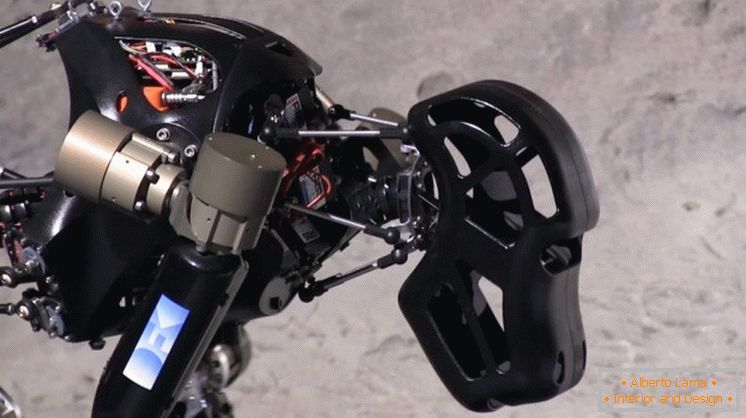
Нямецкі даследчы цэнтр штучнага інтэлекту (DFKI) і Брэменскі універсітэт працуюць над малпападобнага робатам iStruct Demonstrator, яго класіфікуюць як «касмічнага робата». Зараз механічныя малпы праходзяць тэсты на хаду і раўнавагу ва ўмовах набліжаных да рэльефу месяца.

Вывучэнне небяспечных месяцовых паверхняў патрабуе прымяненне розных формаў перамяшчэння, і даследчыкі з DFKI вывучаюць іх магчымасці (уключаючы камбінацыю ног, колаў і гусеніц). Малпападобнага робаты маюць пэўныя перавагі ў параўнанні з колавымі, четырехточечные апора дазваляе стварыць больш устойлівую пазіцыю пры карабканье праз перашкоды або пагорыстыя мясцовасць. Робат можа балансаваць на задніх лапах, каб вызваліць пярэднія канечнасці для выканання якіх-небудзь дзеянняў.

З новымі міжнароднымі інтарэсамі да месячнай місіі, ёсць верагоднасць, што iStruct (або адзін з яго нашчадкаў) зможа пабываць на Месяцы. Каланізацыя Месяца робатамі пачнецца з распрацоўкі, якая зможа развівацца і разумна рэагаваць у любой сітуацыі, якая ситуации.В сувязі з гэтым, мэтай праекта з'яўляецца пабудова "прасунутага штучнага інтэлекту» і рабатызаваных сістэмы, якая зможа навучацца, і арыентавацца на ваколіцах.
У робата ёсць шарнірна пазваночнік злучае тулава і таз, надаючы яму вялікую гнуткасць, а так жа датчык нагрузкі ступні і галёнкаступнёвага сустава, якія рэагуюць пры кантакце з зямлёй.
Іншыя характарыстыкі ўключаюць:
- 43 незалежных матора;
- Шэсць дадатковых датчыкаў FSR на адкрытых частках, якія выкарыстоўваюцца для выяўлення перашкод;
- 6-восевай Torque-датчык;
- Лічбавай 3-восевай акселерометр, для ўспрымання арыентацыі ступні ў прасторы;
- Два тэмпературных датчыка для кампенсацыі тэмпературных змен у электроніцы;
- Лічбавай магнітны датчык вуглавога кантролю кожнай рухомай восі ступні і галёнкаступнёвага сустава;
Большасць робатаў ўжо ўтрымліваюць многія з гэтых датчыкаў, але сучленены пазваночнік iStruct (які можа функцыянаваць у якасці 6-восевага силомоментного датчыка) нешта накшталт рэдкасці для апорна-рухальных робатаў, які дапамагае пры руху на карачках. Датчыкі ў стопах і галёнкаступнёвых суставах дазволяць яму захаваць раўнавагу на нахільнай паверхні.
У 2008 і 2009 гадах, дыпламаваны інжынер Даніэль Кюн працаваў над аналагічным робатам. Маленькая малпа, якая была здольная на простую Чатырохногіх хаду. Пасля гэтага праекта ён пачаў працу над iStruct, які мае шэраг істотных зьменаў. Гэта значна большую вагу, 18 кг (40 фунтаў) і памеры 66 х 43 х 75 см (26 х 17 х 29 цаляў), а таксама змяшчае 26 ступеняў свабоды, і харчаванне ад розных электрарухавікоў. Праект павінен быць завершаны ў жніўні гэтага года.
Вы можаце бачыць, як ён выкарыстоўвае свае інтэлектуальныя ступні і галёнкаступнёвыя суставы пры хадзе і захаванні раўнавагі на відэа ніжэй. Гэта маленькі крок для робата малпы, але патэнцыйна гіганцкі скачок для ўсёй робататэхнікі падобнай канструкцыі.
хада
балансаванне
Фотагалерэя Усяго | 14 фота